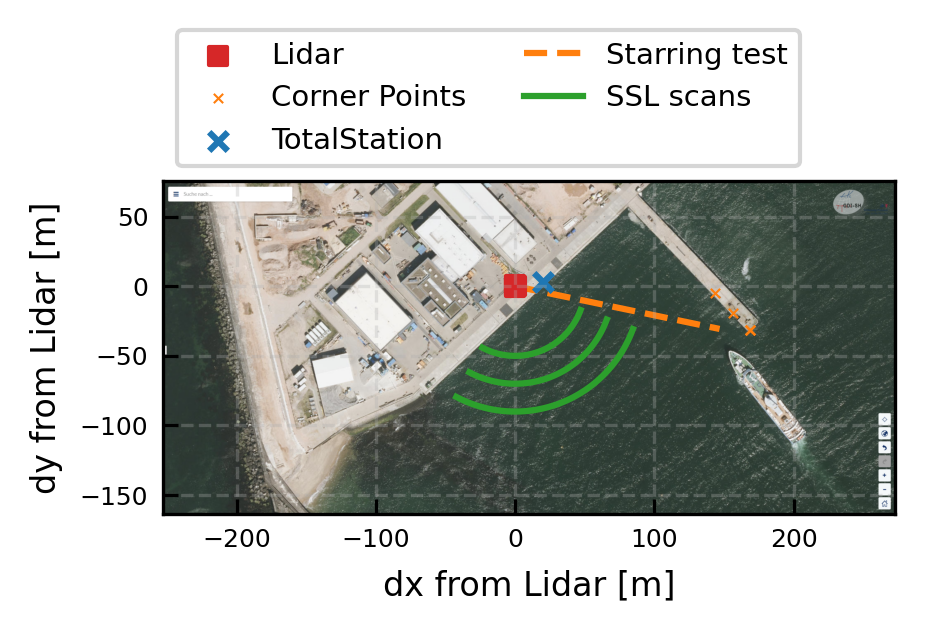
Test setup at Heligoland
This notebook documents the general test setup, locations and more information for the validation measurements at Heligoland.
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
from lidalign.utils import load_template, publication_figure
import plotly.graph_objects as go
from PIL import Image
import skimage.io as sio
load_template()
import pathlib
savepath = pathlib.Path.home() /'Figures'
savepath.mkdir(exist_ok=True)
Using lidar_monitoring.mplstyle as matplotlib style template
Visualization of the site
positions = pd.read_csv('data/HELGOHARB 20250503.csv', header = None, names = ['Position','X','Y','Z','Type'], index_col= 'Position')
pos_rel = positions.copy()
pos_rel[['X','Y','Z']] -= positions.loc['LIDARHEAD',['X','Y','Z']].astype(float)
pos_rel.loc['Watercorner'] = pos_rel.loc['CORNER 2'].copy()
pos_rel = pos_rel.dropna(axis = 0, how = 'any')
pos_rel['azimuth'] = np.rad2deg(np.arctan2(pos_rel['X'], pos_rel['Y'])) #np.rad2deg(np.arctan2(pos_rel['X'], pos_rel['Y']))
pos_rel['elevation'] = np.rad2deg(np.arctan(pos_rel['Z'] / (pos_rel['X']**2 + pos_rel['Y']**2)**0.5))
pos_rel['Distance'] = np.sum(pos_rel[['X','Y','Z']]**2, axis = 1)**0.5
print(pos_rel['Distance']) ## reference is corner2!
aim = pos_rel.loc['Watercorner']
print()
print(aim)
Position
STATION A 20.579809
CORNER 1 171.538760
CORNER 2 171.583166
CORNER 3 157.601132
CORNER 4 143.303444
LIDARLEG1 1.334438
LIDARLEG2 1.294822
LIDARLEG3 1.313251
LIDARHEAD 0.000000
C6 171.523649
C7 171.565801
STATION B 3.764995
Watercorner 171.583166
Name: Distance, dtype: float64
X 168.525
Y -31.603
Z -6.431
Type P
azimuth 100.621154
elevation -2.14797
Distance 171.583166
Name: Watercorner, dtype: object
pos_rel
| X | Y | Z | Type | azimuth | elevation | Distance | |
|---|---|---|---|---|---|---|---|
| Position | |||||||
| STATION A | 20.365 | 2.964 | -0.100 | ST | 81.719098 | -0.278409 | 20.579809 |
| CORNER 1 | 168.569 | -31.741 | -1.596 | P | 100.663751 | -0.533089 | 171.538760 |
| CORNER 2 | 168.525 | -31.603 | -6.431 | P | 100.621154 | -2.147970 | 171.583166 |
| CORNER 3 | 156.440 | -19.036 | -1.508 | P | 96.937782 | -0.548241 | 157.601132 |
| CORNER 4 | 143.204 | -5.120 | -1.509 | P | 92.047635 | -0.603342 | 143.303444 |
| LIDARLEG1 | -0.168 | -0.580 | -1.190 | P | -163.846067 | -63.095421 | 1.334438 |
| LIDARLEG2 | 0.524 | 0.050 | -1.183 | P | 84.549348 | -66.013156 | 1.294822 |
| LIDARLEG3 | 0.016 | 0.604 | -1.166 | P | 1.517414 | -62.607170 | 1.313251 |
| LIDARHEAD | 0.000 | 0.000 | 0.000 | P | 0.000000 | NaN | 0.000000 |
| C6 | 168.532 | -31.674 | -3.753 | P | 100.644039 | -1.253753 | 171.523649 |
| C7 | 168.594 | -31.759 | -1.501 | P | 100.668113 | -0.501277 | 171.565801 |
| STATION B | -0.112 | 3.762 | -0.100 | ST | -1.705272 | -1.521981 | 3.764995 |
| Watercorner | 168.525 | -31.603 | -6.431 | P | 100.621154 | -2.147970 | 171.583166 |
Background image by GDI: https://gdi-sh.de/gdish/DE/AufgabenZiele/DANord
path = 'misc_data/pictures/TopViewHeligoland_427428_6003256_427954_6003495.png'
img = Image.open(path).convert('RGB')
img = Image.open(path).convert('RGB')
z = np.mean(np.array(img), axis=2)
left,bottom,right,top = [float(f) for f in path.replace('.png','').split('_')[-4:]]
# fig, ax = plt.subplots(1,1, figsize=(6,4), dpi = 300)
fig, ax= publication_figure(1/2)
# ax[0].text(50, 100, 'original image', fontsize=16, bbox={'facecolor': 'white', 'pad': 6})
refpos = positions.loc['LIDARHEAD',['X','Y','Z']]
l,r,b,t= left-refpos['X'], right-refpos['X'], bottom - refpos['Y'], top - refpos['Y']
ax.imshow(img, extent = (l,r,b,t))
azi_starring, range_starring = 101.8, 150
x = np.array([0,range_starring* np.sin(np.deg2rad(azi_starring))])# + refpos.loc['LIDARHEAD','X']
y = np.array([0,range_starring* np.cos(np.deg2rad(azi_starring))])# + pos_rel.loc['LIDARHEAD','Y']
pos_rel.filter(like = 'LIDAR', axis = 0).plot.scatter(x = 'X', y = 'Y', ax = ax, c= 'tab:red', label = 'Lidar', marker = 's')
pos_rel.filter(like = 'C', axis = 0).plot.scatter(x = 'X', y = 'Y', ax = ax, c= 'tab:orange', label = 'Corner Points', marker = 'x', s = 5, lw = 0.5)
pos_rel.filter(like = 'STATION A', axis = 0).plot.scatter(x = 'X', y = 'Y', ax = ax, c= 'tab:blue', label = 'TotalStation', marker = 'x')
ax.plot(x,y, c = 'tab:orange', ls = '--', zorder = 0, label = 'Starring test')
azi = np.arange(110,210,2)
ranges = np.array([50,70,90])
xpo, ypo = np.sin(np.deg2rad(azi))[:,np.newaxis]*ranges[np.newaxis,:], np.cos(np.deg2rad(azi))[:,np.newaxis]*ranges[np.newaxis,:]
ax.plot(xpo, ypo, c = 'tab:green')
ax.plot([],[],c = 'tab:green', label = 'SSL scans')
ax.set(xlabel = 'dx from Lidar [m]', ylabel = 'dy from Lidar [m]')
ax.legend(loc = 'lower left', bbox_to_anchor = (-0,1), ncols = 2)
ax.set_aspect('equal')
plt.savefig(savepath / 'TopView.pdf', bbox_inches = 'tight')
Lidar time correction:
Unfortunately, the time was not correctly set by the lidar. The measurements were performed 2025-05-03 while the lidar gives dates of 2010-01-02. We correct the time for an offset determined from pictures and actual lidar observations. We estimate the uncertainty to be ~1min.
Therefore, we must correct the times in the lidar:
import pandas as pd
time_difference_lidar_actual = pd.to_datetime('2025-05-03 10:37') - pd.to_timedelta('2h') - pd.to_datetime('2010-01-02 15:51:32') ## PC time - Lidar time - correction for UTC
time_difference_lidar_actual
Timedelta('5599 days 16:45:28')
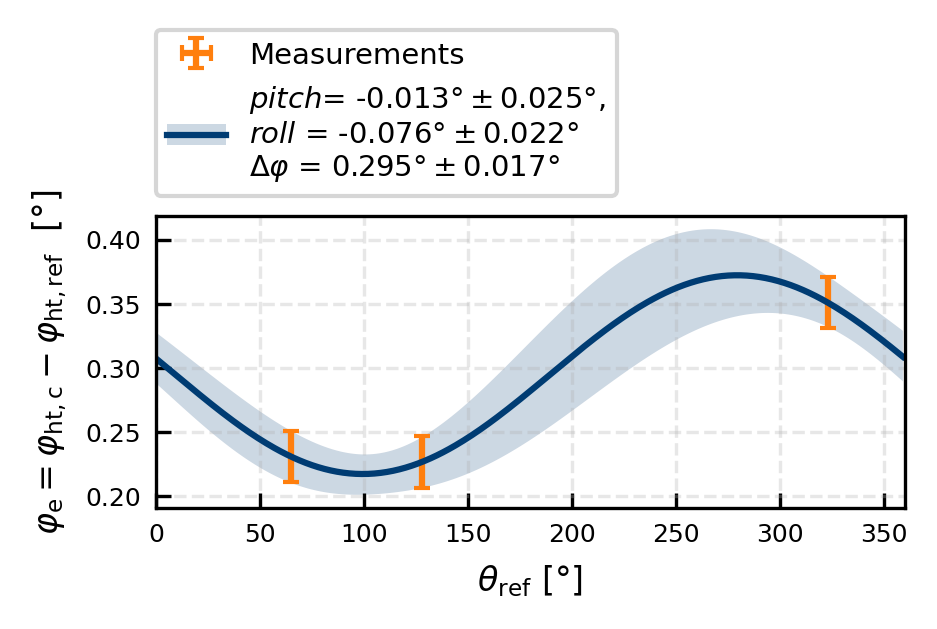
Hard target mapping
We will here use the correct (theodilite) azimuth values to correct our lidar elevation. First, we correct the lidar azimuth, then we use the corrected lidar azimuth to correct the lidar elevation.
%matplotlib inline
from lidalign.hard_target_elevation_mapping import HardTargetMappingElevation
fitti = pd.read_excel(r'data/Hard_target_mapping_with_fitting.xlsm', sheet_name='HTM')
fitti = fitti.dropna(subset ='Delta Ele')
# print(fitti)
HTM = HardTargetMappingElevation(fitti['Theo_Azimuth'].values,
fitti['Delta Ele'].values,
fitti['Unc_azi'].values, fitti['Unc_ele'].values
)
#%%
# HTM.fit(typ = 'cosine')
# print(HTM.params)
# fig, ax = publication_figure(1, height = 3)
# ax = HTM.plot(ax = ax)
HTM.fit(typ = 'Other')
print(HTM.params)
mean std form
0 322.91118 0.02 normal
1 127.97466 0.02 normal
2 64.84780 0.02 normal
mean std form
0 0.35087 0.02 normal
1 0.22672 0.02 normal
2 0.23092 0.02 normal
Other
[-0.01262319 -0.07641097 0.29472066]
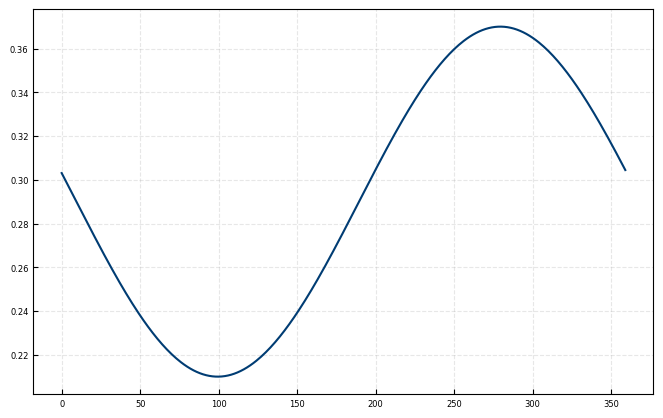
fig, ax = publication_figure(1/2, height = 2.3)
ax = HTM.plot(ax= ax)
leg = ax.get_legend()
ax.set(ylabel = r'$\varphi_{\rm e}= \varphi_{\rm ht,c} - \varphi_{\rm ht,ref}$ [°]', xlabel = r'$\theta_{\rm ref}$ [°]', xlim = (0,360))
ax.set(title = None)
leg.set_bbox_to_anchor((-0.02, 1.02)) # outside right of axes
leg.set_loc("lower left")
plt.savefig(savepath + 'HardTargetMapping_Elevation.pdf', bbox_inches = 'tight', pad_inches = 0.00001)
# # -------------------------- with lidar azimuth as x ------------------------- #
# HTM = HardTargetMappingElevation(fitti['Azimuth'].values,
# fitti['Delta Ele'].values,
# fitti['Unc_azi'].values, fitti['Unc_ele'].values
# )
# #%%
# HTM.fit()
# params = HTM.params
# print(params)
# #%%
# ax = HTM.plot()
(1000, 360)
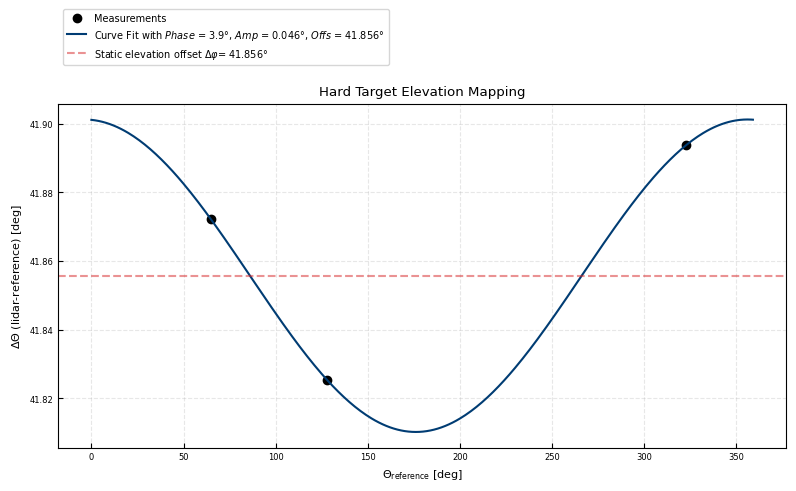
Derived scanner offset correction
HTM = HardTargetMappingElevation(fitti['Theo_Azimuth'].values,
((fitti['Delta Azi'].values)+180 ) %360 -180,
# fitti['Unc_azi'].values, fitti['Unc_ele'].values
)
# params = HardTargetMappingElevation.fit_TaitBryanAngles(fitti['Theo_Azimuth'].values,
# fitti['Theo_Elevation'].values,
# (fitti['Azimuth'].values-41.87)%360, fitti['Elevation'].values)
# print(params)
#%%
HTM.fit()
params = HTM.params
print(params)
#%%
ax = HTM.plot()
ax.set(ylabel = r'$\Delta \Theta$ (lidar-reference) [deg]')
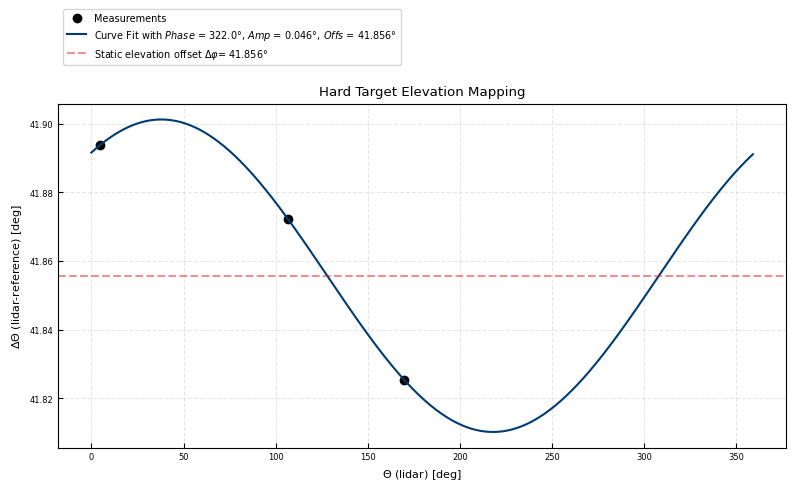
# ----------------------- as function of lidar azimuth ----------------------- #
HTM = HardTargetMappingElevation(fitti['Azimuth'].values,
((fitti['Delta Azi'].values)+180 ) %360 -180,
# fitti['Unc_azi'].values, fitti['Unc_ele'].values
)
# params = HardTargetMappingElevation.fit_TaitBryanAngles(fitti['Theo_Azimuth'].values,
# fitti['Theo_Elevation'].values,
# (fitti['Azimuth'].values-41.87)%360, fitti['Elevation'].values)
# print(params)
#%%
HTM.fit()
params = HTM.params
print(params)
#%%
ax = HTM.plot()
ax.set(ylabel = r'$\Delta \Theta$ (lidar-reference) [deg]', xlabel = r'$\Theta$ (lidar) [deg]')
[ 3.92955323 0.04550043 41.85572916]
[3.22039521e+02 4.55247703e-02 4.18557071e+01]
[Text(65.70833333333333, 0.5, '$\\Delta \\Theta$ (lidar-reference) [deg]'),
Text(0.5, 35.58333333333332, '$\\Theta$ (lidar) [deg]')]
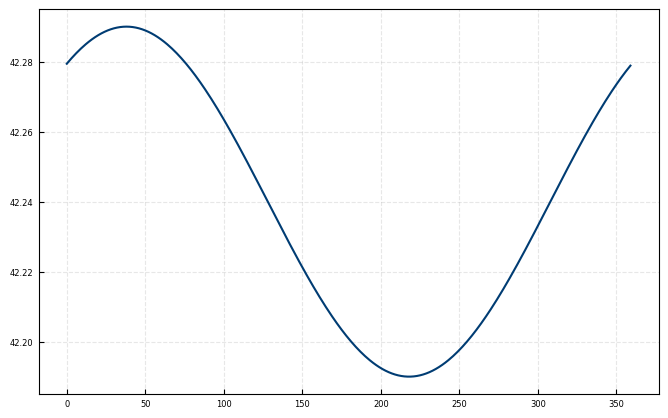
def angle_offset_function(azimuth, phase, amplitude, offset):
return np.cos(np.deg2rad(phase + azimuth))* amplitude + offset
azimuth_phase = 322
azimuth_ampl = 0.05
azimuth_offset = 41.86 + 0.38 # 0.38° repositioning offset, theodilite has been moved and not perfectly aligned with first positions
# elevation_offset = 0.217 # approximately for azi =100° from HTM
elevation_phase = 80.6
elevation_ampl = 0.08
elevation_offset = 0.29
azis = np.arange(0,360)
fig,ax = plt.subplots()
ax.plot(azis, angle_offset_function(azis, 80.6, 0.08, 0.29))
fig,ax = plt.subplots()
ax.plot(azis, angle_offset_function(azis, azimuth_phase, azimuth_ampl, azimuth_offset))
[<matplotlib.lines.Line2D at 0x16d7e00ec60>]
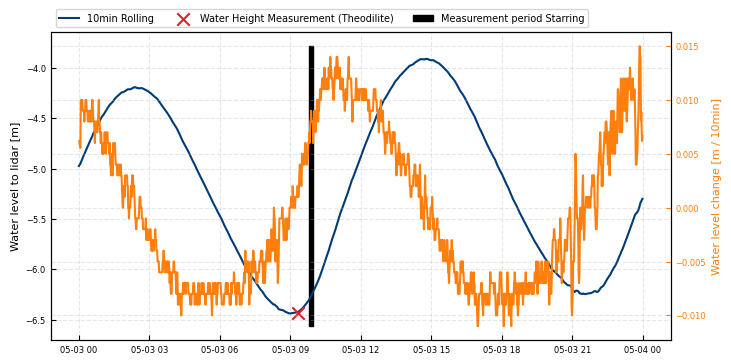
Water level impact
During the measurements, we observed a variation of the water level with time, caused by tidal variations of the water level within the harbour. We found a reference water level measurement in the harbour from this database, provided by the Wasserstraßen und Schiffahrtsverwaltung des Bundes.
We estimate the uncertainty to be ~0.1m.
In the following, the water level variations during the different scans are shown.
t_waterheight_measurement, water_height_measurement = pd.to_datetime('2025-05-03 09:19:11'), -6.431 ## from screenshot and theodilite
import matplotlib.dates as mdates
t0 = pd.to_datetime('2025-05-03T09:47:50.223')
t1 = pd.to_datetime('2025-05-03T09:56:59.553')
import pandas as pd
water_level_df = pd.read_csv('https://zenodo.org/records/18698332/files/pegelonline-helgolandbinnenhafen-W-20250101-20250820.csv', sep = ';', parse_dates = True, index_col = 0)
water_level_df.index = water_level_df.index - pd.Timedelta(hours = 2) # adjust for UTC
water_level_df = water_level_df.loc['2025-05-03']
water_level_df = water_level_df / 100 # in meters
# -------------- correct for actual height of lidar above water -------------- #
ref_height = water_level_df.loc[t_waterheight_measurement:].values[0]
water_level_lidar = water_level_df - ref_height + water_height_measurement
fig, ax = plt.subplots(figsize=(8, 4))
roll = water_level_lidar.rolling('10min', center = True).mean()
ax.plot(roll, label = '10min Rolling')
ax.scatter(t_waterheight_measurement, water_height_measurement, color='tab:red', marker = 'x', label='Water Height Measurement (Theodilite)', zorder = 100, s = 80)
ax.fill_betweenx(ax.get_ylim(), t0, t1, color='k', alpha=1, label = 'Measurement period Starring')
print(f"Height difference during measurement period Starring: {np.diff(water_level_lidar.loc[t0:t1].values[[0,-1]].T[0])[0]:.3f} m")
# ax.axvline(t0)
# ax.axvline(t1)
# ax.fill_between([t0, t1], [400,600])
axd = ax.twinx()
axd.plot(roll.index, roll.diff(), c = 'tab:orange')
axd.set(ylabel = 'Water level change [m / 10min]')
axd.yaxis.label.set_color('tab:orange')
axd.tick_params(axis='y', colors='tab:orange')
ax.set(ylabel = 'Water level to lidar [m]')
# ax.xaxis.set_major_locator(mdates.HourLocator(interval=6))
# ax.xaxis.set_major_formatter(mdates.DateFormatter('%H:%M'))
ax.legend(loc = 'lower left', bbox_to_anchor=(0, 1), ncols = 3)
Height difference during measurement period Starring: 0.070 m
<matplotlib.legend.Legend at 0x16d7c3a1df0>
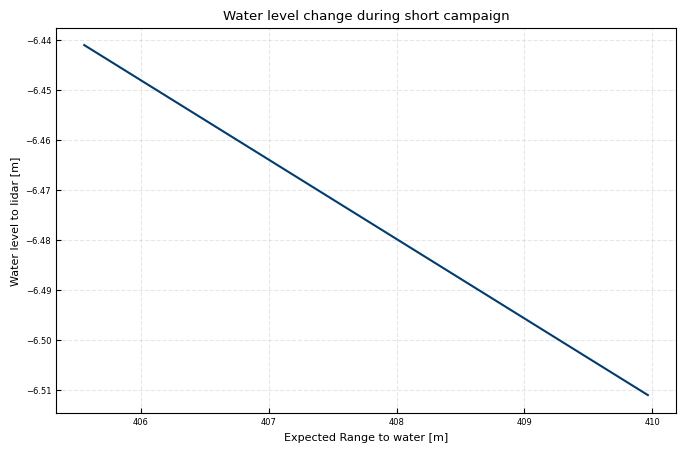
During Starring Test:
elevation = -0.910
delta_height = 0.2
fig, ax =plt.subplots()
R = (water_level_lidar.loc[t0:t1]-delta_height)/ np.sin(np.deg2rad(elevation))
ax.plot(R, water_level_lidar.loc[t0:t1]-delta_height)
print(np.diff(water_level_lidar.loc[t0:t1].values[[0,-1]].T[0]), R.iloc[-1]-R.iloc[0], water_level_lidar.loc[t0:t1].diff().iloc[1])
ax.set(xlabel = 'Expected Range to water [m]', ylabel = 'Water level to lidar [m]', title= 'Water level change during short campaign')
print(f'10cm water level difference can lead to {-0.1 /np.sin(np.deg2rad(elevation)):.2f}m Range difference')
[0.07] value -4.407553
dtype: float64 value 0.02
Name: 2025-05-03 09:49:00, dtype: float64
10cm water level difference can lead to 6.30m Range difference
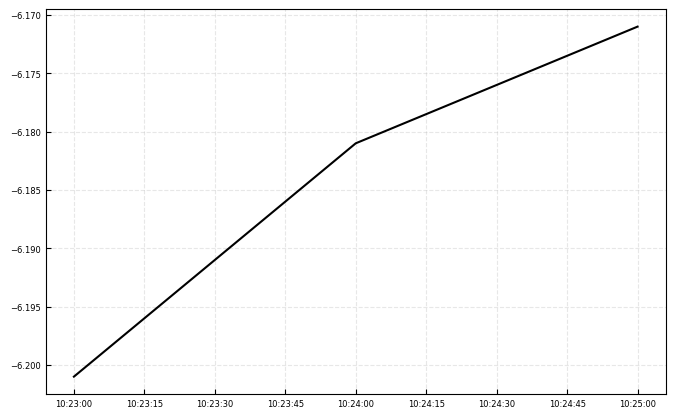
During the SSC test:
elevation = -0.910
delta_height = 0.20
fig, ax =plt.subplots()
waterlevel_scc = (water_level_lidar.loc['2025-05-03T10:22:07.934000000':'2025-05-03T10:25:35.606000000']-delta_height)
ax.plot(waterlevel_scc.index, waterlevel_scc, label = 'Expected Range to water', c = 'k')
print(f'Mean water level during SCC: {waterlevel_scc.mean().values[0]:.2f} m')
print(f'std water level during SCC: {waterlevel_scc.std().values[0]:.2f} m')
Mean water level during SCC: -6.18 m
std water level during SCC: 0.02 m
Hard target results (not evaluated here)
from lidalign.io import WindCubeScanDB
DBS = WindCubeScanDB(r'C:\Users\Paul\Nextcloud\Harbour Test\Harbour Test\\', datatype = 'scans', file_structure='flat')
metadata = DBS.get_data()
metadata.to_excel(savepath + 'ScansOverview.xlsx')
Finding all files for scans
--> 328 files found
Filtering for 2025-01-01 00:00:00+00:00 to 2026-01-12 15:39:04.896081, None
--> 328 files found for given regex and time range
---------------------------------------------------------------------------
UnboundLocalError Traceback (most recent call last)
Cell In[13], line 3
1 from lidalign.io import WindCubeScanDB
2 DBS = WindCubeScanDB(r'C:\Users\Paul\Nextcloud\Harbour Test\Harbour Test\\', datatype = 'scans', file_structure='flat')
----> 3 metadata = DBS.get_data()
4 metadata.to_excel(savepath + 'ScansOverview.xlsx')
File ~\Code\packages\own\lidalign\lidalign\io.py:341, in WindCubeScanDB.get_data(self, start, end, concatenated, timedelta_back, filename_regex, **read_kwargs)
338 # need to create datetime index again
339 ds["Timestamp"] = pd.to_datetime(ds["Timestamp"], utc=True)
--> 341 return ds
UnboundLocalError: cannot access local variable 'ds' where it is not associated with a value
# group = ['HardTarget_HTM TOwer3_ppi','HardTarget_Safety2_ppi','HardTarget_safety6_ppi','HelgoHarbour_ppi1',
# 'HardTarget_Corner25m_ppi','HardTarget_Corner25_ppi','HardTarget_c25_ppi','HardTarget_c50_ppi',
# 'HardTarget_HTM TOwer2_ppi']
if False:
DBS = WindCubeScanDB(r'C:\Users\Paul\Nextcloud\Harbour Test\Harbour Test\\', datatype = 'scans', file_structure='flat')
metadata = DBS.get_data()
metadata.to_excel(savepath + 'ScansOverview.xlsx')
groups = [g for g in metadata['group_names'].unique() if 'ppi' in g and 'HardTarget' in g]
# groups = ['HardTarget_safety6_ppi']
for group in groups:
fileids = sorted(metadata.loc[metadata['group_names']==group,'identifier'])
htmdata = DB.get_data(filename_regex='|'.join([str(id) for id in fileids]))
# if len(htmdata)>len(fileids):
import pandas as pd
fig, ax = plt.subplots(figsize = (12,8))
for htmd in htmdata:
# ax.scatter(htmd['azimuth'], htmd['elevation'], c= htmd['cnr'].max(dim = 'range'), vmin = -5, vmax = 5)
cb = ax.scatter(htmd['azimuth'], htmd['elevation'], c= htmd['cnr'].idxmax(dim = 'range'))
plt.colorbar(cb, ax = ax)
ax.set_aspect('equal')
ax.set(xlabel = 'Azimuth [deg]', ylabel = 'Elevation [deg]', title = group)
plt.savefig(r'C:\Users\Paul\Nextcloud\Harbour Test\CNRmaps\\' + f"{group}_{pd.to_datetime(htmdata[0].time.values[0]).strftime('%Y%m%d-%H%M')}.jpg")
plt.close(fig)